June 2, 2026
What Is a Digital Twin — And How It Feeds Physical AI Training
A digital twin is a physics-accurate virtual replica of a real-world asset. Learn how they work, how they're built, and why Physical AI teams train on them.
A digital twin is a physics-accurate virtual replica of a real-world asset. Learn how they work, how they're built, and why Physical AI teams train on them.

Key takeaways
A digital twin is a physics-accurate virtual replica of a real-world object, machine, or environment. It mirrors how that thing looks, behaves, and responds to force, friction, and movement, not just how it appears on screen.
For most of its history, the digital twin was a monitoring tool. Engineers used it to track the state of a physical asset in real time: a jet engine, a factory line, a wind turbine.
Today, for robotics teams and foundation model labs, a digital twin is something different. It is the environment an AI model trains inside before it ever touches the real world.
The concept was introduced by Michael Grieves at the University of Michigan in 2002, and later operationalized by NASA to model spacecraft during the Apollo program. The core idea? Create a virtual counterpart of a physical thing, keep it synchronized with real-world data, and use it to understand, predict, and improve the behavior of the original.
From this, we can understand that a digital twin is not a static 3D model. It is not a render or a visualization. It is a persistent, data-connected replica that evolves as its physical counterpart evolves. A humanoid robot changes state? Then, the twin reflects that change.
Every digital twin is built on three things working together.
The first is the physical entity itself: the real-world object, machine, or environment the digital copy represents. This is the source of reality the twin is built to reflect.
The second is data integration: the connection between the physical and virtual. In industrial applications, this is typically sensor data and IoT feeds. In physical AI, it is source materials: images, video, scans, CAD files, telemetry. Everything that describes what the physical thing actually is and how it actually behaves.
The third is the virtual model: the replica itself. This is where geometry, materials, physics properties, and spatial relationships are represented in a form a simulator or AI model can operate inside.
Real-time data integration is what keeps that connection alive. In industrial deployments, sensor streams update the virtual model continuously, so the twin reflects not just what an asset looks like, but what state it is in right now.
In physical AI, the equivalent is a data pipeline that converts new source material into updated physics-accurate assets without manual intervention. The twin is only as current as the data flowing into it.
Most teams treat digital twin architecture as a software question: which platform, which database, which API. For monitoring and operations use cases, that framing is reasonable. For physical AI, another approach is needed.
For physical AI, digital twin architecture is primarily a data question: how accurate, complex, and thorough the virtual model layer is determines whether the twin is useful for training or not.
Think of it in three layers:
One digital twin is an engineering project. Thousands of object categories across hundreds of environment types, at the volume foundation models actually need, is an infrastructure problem. Build for that scale from the start or retrofit it later at much greater cost.
Architecture determines fidelity. Fidelity determines whether the model works when it leaves the simulator and runs on real hardware.
In traditional industries, a digital twin monitors. In physical AI, it teaches. A robot or foundation model trains by operating inside one, accumulating in days the experience that would take years and significant cost to gather in the real world.
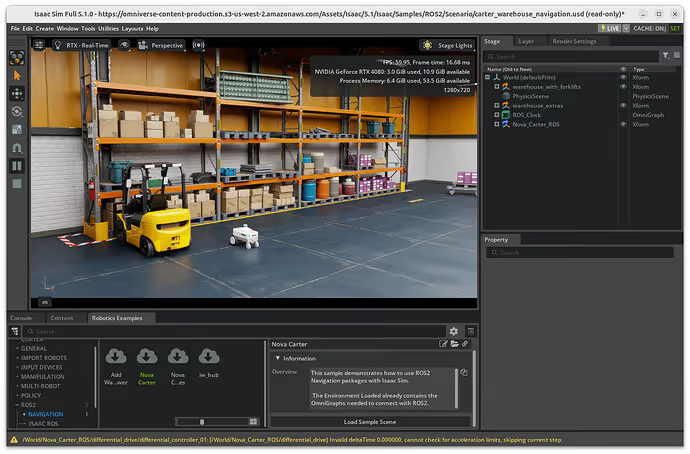
NVIDIA Isaac Sim is one of the primary platforms where this training happens, relying on physics-accurate digital twins as its core input. The physics accuracy of that environment is the direct determinant of how well the model performs when it leaves the simulator and operates in the real world.
Foundation model teams, for instance, use digital twins to generate the massive-scale 3D scene libraries their world models need to learn how physical environments are structured and how objects within them behave. For a deeper look at what this data requires, see physical AI training data.
What does this look like in practice? Let us consider a few examples and use cases in robotics:
Manipulation training: To train a robot arm, you need exact digital twins of both the arm and every object it will interact with. Think of an autonomous arm on a factory line, assembling small components over and over in simulation, learning every possible outcome before it touches a real part. Wrong mass or wrong friction, and the grasp that works in simulation fails on the line.
Navigation training: Navigation requires a different kind of digital twin: not one object, but hundreds combined into an environment a robot learns to move through. The advantage is scale. Instead of a handful of handcrafted scenes, digital twins make it possible to generate thousands of layout variations programmatically. A warehouse with shelves in different configurations. A domestic environment with sofas, chairs, and doorways rearranged every time. The robot learns to navigate a distribution of spaces, not just one.
Long-horizon tasks: The most demanding use case involves digital twins of complete sequences of actions. A hospital robot that picks up a tray, navigates a corridor, opens a door, and places the tray. A logistics robot that sorts, routes, and hands off across a multi-step process. Each step depends on the previous one. The robot trains to reason about consequences before it acts, not just react to what is in front of it.

A simulation is a one-time run. Define conditions, run the scenario, get the output. Once it has answered the question, it is done.
A digital twin is persistent. It exists continuously and can be combined with other assets to create an environment. Inside that environment, you can run hundreds or thousands of simulations, each one a variation of the last. Different lighting, different object positions, different layouts. That is what turns a digital twin into a training ground, and why it is a fundamentally different tool from a single simulation.
The more physically accurate that environment is, the more what a robot learns inside it holds up in the real world. That is what determines whether the sim-to-real gap closes or widens.
At Physicl, we can turn almost any source material into a physics-accurate digital twin, and combine those twins to build complete training environments at scale.
The process works in five steps:
The result is a digital asset a robot or foundation model can actually train with. Not a visualization. Not an approximation. An environment that behaves the way the real world behaves.
"Anyone can ingest a scan and output geometry. What we do differently is derive physics from what an object actually is: its shape, its material. Friction, mass, collision properties are not estimated by an engineer or guessed by a model. They emerge from the asset itself. That is the difference between data that looks right and data a robot can actually train on," said Alex De Vigan, CEO and Founder of Physicl.
Manufacturing, healthcare, urban planning, oil and gas: many major industries have spent the last decade building virtual replicas of their infrastructures. The technology proved itself. The pattern became standard.
Physical AI is what comes next. Those same environments, built to monitor and optimize, are now becoming the training grounds for the robots and autonomous systems that will operate inside them. The factory twin trains the factory robot. The hospital twin trains the hospital robot. The city twin trains the vehicle.
The scale that implies is unlike anything the technology was originally designed for. That is why the quality of the data inside those twins matters more now than it ever has. Sim-ready, physics-accurate, and built to train on.
A digital twin is only as useful as the physics accuracy of the data it is built from. The virtual model that looks right but behaves wrong produces training data that fails in deployment. The gap between simulation and reality is not a simulation problem. It is a data problem.
Physicl solves it in two ways.
A growing library of sim-ready assets — physics-tagged, collision-meshed, and validated, ready to load directly into Isaac Sim, MuJoCo, Unreal, or Omniverse. No cleanup, no conversion. The physics properties are already baked in. Scaling to 100,000 assets by July 2026 and 1 million by 2027.
Custom digital twin creation — send any source material (images, scans, CAD files, video) and Physicl converts it into physics-accurate, sim-ready 3D assets and environments built specifically for your training pipeline. Meta, Adobe, and World Labs already use Physicl to source simulation-ready environments and physics-tagged assets at scale.
Request access to the Private Beta


